Search Results for author:
Found 18 papers, 6 papers with code
AICoderEval: Improving AI Domain Code Generation of Large Language Models
Therefore, we construct AICoderEval, a dataset focused on real-world tasks in various domains based on HuggingFace, PyTorch, and TensorFlow, along with comprehensive metrics for evaluation and enhancing LLMs' task-specific code generation capability.
In-context Learning for Automated Driving Scenarios
One of the key challenges in current Reinforcement Learning (RL)-based Automated Driving (AD) agents is achieving flexible, precise, and human-like behavior cost-effectively.
RLRF:Reinforcement Learning from Reflection through Debates as Feedback for Bias Mitigation in LLMs
Biases and stereotypes in Large Language Models (LLMs) can have negative implications for user experience and societal outcomes.
CMAT: A Multi-Agent Collaboration Tuning Framework for Enhancing Small Language Models
Open large language models (LLMs) have significantly advanced the field of natural language processing, showcasing impressive performance across various tasks. Despite the significant advancements in LLMs, their effective operation still relies heavily on human input to accurately guide the dialogue flow, with agent tuning being a crucial optimization technique that involves human adjustments to the model for better response to such guidance. Addressing this dependency, our work introduces the TinyAgent model, trained on a meticulously curated high-quality dataset.
WcDT: World-centric Diffusion Transformer for Traffic Scene Generation
To enhance the scene diversity and stochasticity, the historical trajectory data is first preprocessed and encoded into latent space using Denoising Diffusion Probabilistic Models (DDPM) enhanced with Diffusion with Transformer (DiT) blocks.

RoleCraft-GLM: Advancing Personalized Role-Playing in Large Language Models
This study presents RoleCraft-GLM, an innovative framework aimed at enhancing personalized role-playing with Large Language Models (LLMs).

A Fully Data-Driven Approach for Realistic Traffic Signal Control Using Offline Reinforcement Learning
Specifically, we combine well-established traffic flow theory with machine learning to construct a reward inference model to infer the reward signals from coarse-grained traffic data.
Improving the generalizability and robustness of large-scale traffic signal control
Building upon the state-of-the-art previous model which uses a decentralized approach for large-scale traffic signal control with graph convolutional networks (GCNs), we first learn models using a distributional reinforcement learning (DisRL) approach.
 Distributional Reinforcement Learning
Distributional Reinforcement Learning
 Multi-agent Reinforcement Learning
+2
Multi-agent Reinforcement Learning
+2
Fast Rule-Based Decoding: Revisiting Syntactic Rules in Neural Constituency Parsing
Most recent studies on neural constituency parsing focus on encoder structures, while few developments are devoted to decoders.
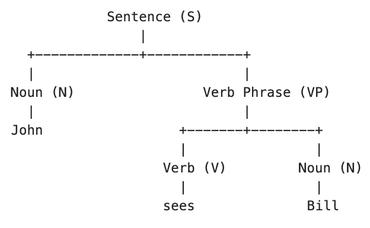
Joint Chinese Word Segmentation and Span-based Constituency Parsing
In constituency parsing, span-based decoding is an important direction.
Order-sensitive Neural Constituency Parsing
We propose a novel algorithm that improves on the previous neural span-based CKY decoder for constituency parsing.
WILD-SCAV: Benchmarking FPS Gaming AI on Unity3D-based Environments
It provides realistic 3D environments of variable complexity, various tasks, and multiple modes of interaction, where agents can learn to perceive 3D environments, navigate and plan, compete and cooperate in a human-like manner.

Towards Modern Card Games with Large-Scale Action Spaces Through Action Representation
Axie infinity is a complicated card game with a huge-scale action space.

Bilateral Deep Reinforcement Learning Approach for Better-than-human Car Following Model
We propose and introduce a Deep Reinforcement Learning (DRL) framework for car following control by integrating bilateral information into both state and reward function based on the bilateral control model (BCM) for car following control.
Efficient Connected and Automated Driving System with Multi-agent Graph Reinforcement Learning
Instead of learning a reliable behavior for ego automated vehicle, we focus on how to improve the outcomes of the total transportation system by allowing each automated vehicle to learn cooperation with each other and regulate human-driven traffic flow.
Driving Decision and Control for Autonomous Lane Change based on Deep Reinforcement Learning
We apply Deep Q-network (DQN) with the consideration of safety during the task for deciding whether to conduct the maneuver.
Efficient Motion Planning for Automated Lane Change based on Imitation Learning and Mixed-Integer Optimization
Traditional motion planning methods suffer from several drawbacks in terms of optimality, efficiency and generalization capability.
A Data Driven Method of Optimizing Feedforward Compensator for Autonomous Vehicle
A reliable controller is critical and essential for the execution of safe and smooth maneuvers of an autonomous vehicle. The controller must be robust to external disturbances, such as road surface, weather, and wind conditions, and so on. It also needs to deal with the internal parametric variations of vehicle sub-systems, including power-train efficiency, measurement errors, time delay, so on. Moreover, as in most production vehicles, the low-control commands for the engine, brake, and steering systems are delivered through separate electronic control units. These aforementioned factors introduce opaque and ineffectiveness issues in controller performance. In this paper, we design a feed-forward compensate process via a data-driven method to model and further optimize the controller performance. We apply the principal component analysis to the extraction of most influential features. Subsequently, we adopt a time delay neural network and include the accuracy of the predicted error in a future time horizon. Utilizing the predicted error, we then design a feed-forward compensate process to improve the control performance. Finally, we demonstrate the effectiveness of the proposed feed-forward compensate process in simulation scenarios.
